viernes, 28 de octubre de 2011
domingo, 10 de abril de 2011
SISTEMA OPERATIVO
Un sistema Operativo es un conjunto de programas de computadora que forman un software mas complejo y estructurado, destinado a realizar diferentes tareas entre estas, la administracion eficaz de sus recursos. Los sistemas operativos abarcan la mayoría de los aparatos electrónicos que tienen microprocesador y los utilizamos cotidianamente como en los celulares, los reproductores de musica, los computadores, entre otros.
Los sistemas operativos comienzan su trabajo luego de que en un computador la BIOS envia la informacion sobre que dispositivos debe leer principalmente. Este ejecuta algunas funciones principales para iniciar la interfaz, entre estas hay varias aplicaciones que crean una interfaz gráfica para que el usuario pueda recibir respuestas visualmente.
PROGRAMA PRINCIPAL DEL SISTEMA:
El principal programa del sistema es llamado "Nucleo" o "Kernel". Este es el encargado de facilitar a los distintos programas acceso seguro a los dispositivos fisicos de la computadora o basicamente, es el encargado de gestionar recursos, a travesde servicios de llamada al sistema.
El principal programa del sistema es llamado "Nucleo" o "Kernel". Este es el encargado de facilitar a los distintos programas acceso seguro a los dispositivos fisicos de la computadora o basicamente, es el encargado de gestionar recursos, a travesde servicios de llamada al sistema.
GRANDES FUNCIONES DEL SISTEMA OPERATIVO:
Los sistemas operativos, en su función de software posibilitan y simplifican el manejo de la computadora, hacen una serie de funciones esenciales para la gestión del equipo, entre ellas estan cada una de las ejercidas por un componente interno(modulo en núcleos monoliticos y servidor en micronucleos) como:
- Proporcionar más comodidad en el uso de un computador.
- Gestionar de manera eficiente los recursos del equipo, ejecutando servicios para los procesos (programas)
- Brindar una interfaz al usuario, ejecutando instrucciones (comandos).
- Permitir que los cambios debidos al desarrollo del propio SO se puedan realizar sin interferir con los servicios que ya se prestaban (evolutividad).
Los sistemas operativos desempeñan 5 funciones básicas en la operacion de un sistema informatico:
1. Suministro de interfaz al usuario: Esta parte se encarga de crear una conexion entre el usuario que permite la comunicación ente estos. Los tipos de interfaz que pueden crearse son: Interfaz de Comandos, Interfaz de Menú e Interfaz gráfica de usuario.
2. Administración de recursos: Sirve para administrar los recursos de hardware como la CPU, la memoria, dispositivos de almacenamiento, etc.
3. Administración de archivos: Este es administrado por un sistema de información que contiene los programas de admistracion de archivos que controlan la creación, el borrado y acceso de archivos de datos.
4. Administración de tareas: Los programas de administración de tareas en un sistema operativo controlan la realización de las tareas informáticas de los usuarios finales. Estos programas controlan el que áreas tienen acceso a la CPU y por cuanto tiempo. ademas los administradores de tareas pueden interrumpir tareas para poder iniciar nuevas tareas de mayor prioridad.
5. Servicio de soporte y utilidades: Estos dependerán de la implementacion particular de este con la que estemos trabajando. Entre las mas conocidas se pueden destacar las implementaciones de Unix, Los sistemas operativos de Apple Inc., los sistemas operativos de Microsoft, y las implementaciones de los software libres como GNU/Linux y BSD.
1. Suministro de interfaz al usuario: Esta parte se encarga de crear una conexion entre el usuario que permite la comunicación ente estos. Los tipos de interfaz que pueden crearse son: Interfaz de Comandos, Interfaz de Menú e Interfaz gráfica de usuario.
2. Administración de recursos: Sirve para administrar los recursos de hardware como la CPU, la memoria, dispositivos de almacenamiento, etc.
3. Administración de archivos: Este es administrado por un sistema de información que contiene los programas de admistracion de archivos que controlan la creación, el borrado y acceso de archivos de datos.
4. Administración de tareas: Los programas de administración de tareas en un sistema operativo controlan la realización de las tareas informáticas de los usuarios finales. Estos programas controlan el que áreas tienen acceso a la CPU y por cuanto tiempo. ademas los administradores de tareas pueden interrumpir tareas para poder iniciar nuevas tareas de mayor prioridad.
5. Servicio de soporte y utilidades: Estos dependerán de la implementacion particular de este con la que estemos trabajando. Entre las mas conocidas se pueden destacar las implementaciones de Unix, Los sistemas operativos de Apple Inc., los sistemas operativos de Microsoft, y las implementaciones de los software libres como GNU/Linux y BSD.
jueves, 10 de febrero de 2011
PERIFÉRICOS DE UN PC...
Son aquellos dispositivos o Hardware auxiliares que se pueden conectar a un Pc y ayudan a un mejor funcionamiento de este; estos dispositivos ayudan a la comunicación de el Pc con el mundo exterior. Existen varios tipos: de Entrada, de Salida, de Almacenamiento y de Comunicación. Entre algunos de estos dispositivos están el mouse, el teclado, el monitor, etc. Antes de instalar un dispositivo debemos tener en cuenta la calidad de la CPU y de la memoria, ya que esta no puede ser suficiente para poder dejar que este dispositivo funcione correctamente y lo mas importante que se desempeñe con rapidez el equipo.
Periféricos de Entrada: Son aquellos que nos permiten ingresar datos en el Pc para su posterior procesamiento por parte de la CPU. Entre los mas distinguidos podemos encontrar:
- Teclado: Es un dispositivo que utiizamos para introducir datos como letras, comandos o accesos rapidos, esta inspirado en las maquinas de escribir antiguas. algunos constan de entre 99 y 108 teclas aproximadamente.
- Mouse: Es otro de los dispositivos de entrada mas habituales en un Pc, ya que este dirije el puntero virtual ubicado en la pantalla y ademas es uno de los medios mas faciles para poder navegar dentro del sistema operativo sin necesidad de comandos complicados.
- Cámara web: Es una pequeña cámara digital conectada a un Pc. Esta puede captar imágenes y enviarlas a travez de Internet, ya sea una para una pagina web o para una tele conferencia.
- Micrófono: Este dispositivo introduce informacion sonora de alguna vibracion en el aire. Cuando hablamos salen de nuestras cuerdas vocales pequeñas vibraciones que son captadas por el microfono y este las convierte en letras o palabras.



Periféricos de Salida: Son aquellos que reciben informacion ya procesada por la CPU y la reproducen para que la puede analizar u observar el usuario. Algunos ejemplos son:
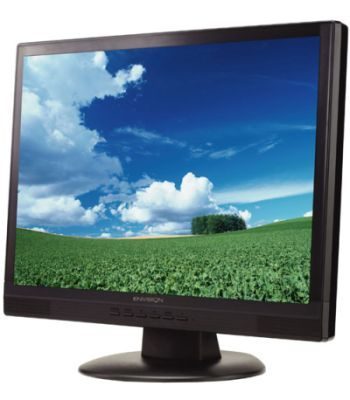
- Monitor: Este dispositivo actua mediante una interfaz y muestra los resultados que son enviados por la CPU despues de que esta ya los haya procesado. El monitor convierte esa informacion en imagenes pixeles que a su vez estan compuestos por tres tipos desubpixeles (Rojo, Azul y verde).
- Altavoz: También llamado"parlante". Este dispositivo convierte los resultados de un proceso de la CPU en ondas sonoras especificas que forman notas musicales, que unidas forman sonidos y canciones. Estas ondas sonoras son recibidas por el oido de un usuario que las transforma en musica.
- Impresora: Este dispositivo permita producir una copia permanente de textos o graficos de documentos almacenados en formato virtual, conviertiendolos a medio físico por medio de tinta o tecnología láser y generalmente hojas de papel.


Periféricos de Almacenamiento: Se encargan de guardar la información de la que hace uso la CPU para que se pueda ver después de que la memoria central las halla eliminado, ya que esta la borra cada vez que se apaga el computador. Pueden ser interno, como el disco duro, o extraibles,como un CD. los mas habituales son:
- Disco Duro: Es un dispositivo de almacenamiento masivo ya que puede guardar cientos de cosas dependiendo su capacidad.los discos duros están compuestos por varios discos de aluminio magnetizados para poder guardar la información; los discos duros actuales tienen conexiones de tipo SATA, IDE y SCSI(utilizado en servidores).
- Unidad de DVD: Este es un dispositivo de almacenamiento ya que al introducir y quemar un DVD la información guardada en el DVD puede ser introducida en cualquier Pc que tenga una unidad de DVD. Ademas, otra de las cosas buenas de un DVD es el tamaño que puede almacenar ya que la mayoría tienen una capacidad de 4,7 GB.
- Memoria USB: Es la mejor forma de transportar datos, ya que a diferencia de las discos duros y los DVD´s, este dispositivo no necesita quemarse ni necesita instalación con el Pc apagado para poder tener información. Este dispositivo acelero la forma de llevar información y ademas su tamaño lo hace mas manejable.


Periféricos de Comunicación: Su función es permitir o facilitar la interacción entre dos o mas Pc´s, o entre un periférico externo y la computadora. entre los mas habituales encontramos:
- Switch(Conmutador): Es un dispositivo digital de interconexion de redes de computadores. Sirve como un puente entre dos o mas redes LAN para de ese modo enviar y recibir información entre estas, lo que mejoraría el rendimiento y la seguridad
- Enrutador(Router): Los enrutadores se utilizan principalmente en la conexión de uno o mas computadores a una linea WAN o de Internet. Los enrutadores pueden proporcionar una red alambrica o inalambrica(se utilizan mas para los computadores portatiles.)
- Bluetooth: Este es uuna especificacion de redes inalambricas de area personal,lo que posibilita la transmicion de datos y voz en un pequeño rango. El bluetooth es una de las mejores herramientas creadas para la transmicion de informacion ya que es muy facil y rapido enviar informacion por medio de este tipo de red.
- Tarjeta de red: Permite la comunicación con aparatos conectados entre si y ademas permite que estos aparatos compartan sus recursos como discos duros, impresoras, unidad de CD, etc. Las tarjetas de red están entre los primeros dispositivos que se utilizaron para conectar varios Pc´s y ademas para compartir recursos.

miércoles, 9 de febrero de 2011
FUENTE DE ALIMENTACIÓN DE UN PC
Una fuente de alimentacion o de poder es un dispositivo que convierte la tension alterna de la red de suministro en una o varias tenciones precticamente continuas que alimentan a un aparato electronico al que se conecta(televisor, computador, impresora). Hay dos tipos de fuentes de poder para conectar a un Pc:
Fuente de alimentación AT: Es de los primeros tipos de fuentes que se utilizaron en un Pc. Tiene 3 tipos de conectores de salida. El primer tipo, del cual hay 2, son los que alimentan a la Board. Los otros dos tipos, de los cuales hay cantidad variable, alimentan a los periféricos no enchufados a un slot de la placa madre, como pueden ser de unidades de CD, Unidades de disquete, Discos duros, etc. La conexión a la placa base se hace por medio de dos cables, cada uno de 6 pines,los cuales deben ir conectados correctamente(cables negros juntos en el centro).

Fuente de alimentación ATX: Es muy similar a la AT, pero tiene una serie de diferencias, tanto en su forma de funcionar como en los voltajes que entrega a la Board. La fuente ATX consta de dos partes: la fuente principal, que es similar ala AT pero con algunas cosas nuevas, y una auxiliar. Ademas de esto, la gran diferencia que existe entre la fuente AT y la ATX es su forma de apagado, ya que la fuente ATX tiene un apagado por software, lo que significa que no es necesario desenchufar la fuente después de apagar la torre.


CARACTERISTICAS PRINCIPALES DE UNA FUENTE DE ALIMENTACIÓN
VOLTAJES:

CONECTORES:
ATX

AT

ETAPAS DE LA FUENTE DE PODER
Transformador: En esta etapa la corriente que es traída de un toma corriente es transformada de 120 Voltios a 12 Voltios con una frecuencia de 60 Hz; este es el voltaje que va a necesitar la fuente para después fijar un voltaje continuo de 12 V, 5V, 3.3 V, etc. los transformadores son dispositivos basados en la inducción electromagnética y están constituidos, en su forma mas simple por dos bobinas devanadas sobre un núcleo cerrado de hierro dulce o hierro silícico.
Rectificador: En esta etapa, también llamada puente de diodos, los diodos que componen esta parte del circuito convierten el voltaje alterno, en voltaje continuo positivo y envía el negativo para una segunda salida de -12 V. esta etapa es muy importante ya que es el comienzo para poder tener la corriente fija que necesitamos y de ese modo que no se queme el circuito.
Filtro: En esta etapa dela fuente, básicamente dos condensadores electrolíticos de 2200 microfaradios evitan el rizado que se crea cuando la linea de corriente comienza a bajar, lo que ademas evita que el voltaje llegue a 0 y por coinsiguiente que el circuito no se apague.
Regulador: En esta etapa, varios reguladores de voltaje fijan una corriente continua especifica necesaria para el Pc. Este voltaje puede ser de 12V, 5V, 3.3 V, etc. Los reguladores son el final de la fuente y son los que envian la corriente final despues de transformarla de AC a DC.
COMO REEMPLAZAR UNA FUENTE DE ALIMENTACIÓN:
COMO REEMPLAZAR UNA FUENTE DE ALIMENTACIÓN:
martes, 8 de febrero de 2011
COOLER
Es cualquier ventilador interno o fijo a la caja de la torre utilizado para refrigerar el interior de esta. Lo que hace es absorber el aire caliente que hay dentro de la torre y expulsarlo al exterior. Ademas hay otros cooler que pueden ser conectados a los microprocesadores y las tarjetas de vídeo, ya que estos dispositivos esta entre los que mas rápido pueden calentarse en un Pc.










PARTES:
Los cooler se dividen en dos partes principales:
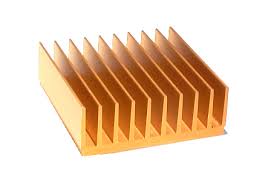
El disipador: este se encarga de absorber el calor que genera el aparato al que están conectados y llevarlo hasta una de sus puntas donde sigue el trabajo del ventilador.
El ventilador: Este absorbe el calor que tiene el disipador en sus extremos y lo expulsa del disipador para que este siga absorbiendo mas calor de aquel aparto.

Los cooler se dividen en dos partes principales:
El disipador: este se encarga de absorber el calor que genera el aparato al que están conectados y llevarlo hasta una de sus puntas donde sigue el trabajo del ventilador.
El ventilador: Este absorbe el calor que tiene el disipador en sus extremos y lo expulsa del disipador para que este siga absorbiendo mas calor de aquel aparto.
Otras partes que podemos mencionar son:
TIPOS DE COOLER:
- Conector M / B 20 +4 pines x 1
- Conector de 4 +4 pines de la CPU x 1
- Conector de 4 pines periféricos 3 x
- Conector SATA x 4
- Conector de 4 pines x 1 disquete
- Conector de 6 pines PCI-e x 1 Conector
TIPOS DE COOLER:
Thermaltake SILENT VOLCANO 9 “CoolMod”
Thermaltake P4 Spark 7
CPU Cooler - PC Enthusiast - AMD K7 - Intel 370 - JET 7
CPU Cooler - PC Enthusiast - AMD K7 - Intel 370 - Aero 7+
CNPS 7000A - ALCU
Thermaltake COPPER SHIM CPU Protector
Exaustor Gabinete
CoolerHD
INSTALACIÓN DE UN COOLER EN EL MICROPROCESADOR:
lunes, 7 de febrero de 2011
JUMPER
Es un elemento utilizado para interconectar dos terminales temporalmente sin tener que efectuar una operación que requiera herramienta adicional. la unión que se forma con el Jumper cierra el circuito del que forma parte. Los Jumper son utilizados generalmente en algunos dispositivos de un Pc, como los discos duros o las unidades de CD y DVD. En los discos duros, estos son utilizados para definir un tipo de configuración especifico(Si este dispositivo va a ser exclavo o maestro).


domingo, 6 de febrero de 2011
MICROPROCESADOR
También llamado procesador o CPU. Es el circuito integrado mas importante y complejo de un computador u ordenador. Muchos lo llaman el cerebro de la Pc; y es cierto, pues este es el encargado de recibir instrucciones por parte de un usuario o del sistema, procesarla y enviar una respuesta ya sea visual o auditiva. Esta constituido por millones de componentes electrónicos integrados a este.
El microprocesador está conectado, generalmente, mediante un zócalo específico a la placa base. Normalmente para su correcto y estable funcionamiento, se le adosa un sistema de refrigeración, que consta de un disipador de calor fabricado en algún material de alta conductividad térmica, como cobre o aluminio, y de uno o más ventiladores que fuerzan la expulsión del calor absorbido por el disipador; entre éste último y la cápsula del microprocesador suele colocarse pasta térmica para mejorar la conductividad térmica.
ARQUITECTURA:
Dependiendo del número de instrucciones que soporte la CPU distinguimos dos tipos de arquitecturas:
- CISC: Complex Instruction Set Computer.
- RISC: Reduced Instruction Set Computer.
Dependiendo de la forma de acceder a la memoria de datos y de instrucciones de programa se tiene:
- Von Newman:utilizan el mismo dispositivo de almacenamiento tanto para las instrucciones como para los datos (a diferencia de la arquitectura Harvard).La mayoría de computadoras modernas están basadas en esta arquitectura
- Harvard: Utilizan dispositivos de almacenamiento físicamente separados para las instrucciones y para los datos . El término proviene de la computadora Harvard Mark I, que almacenaba las instrucciones en cintas perforadas y los datos en interruptores.
GENERACIONES:
1ra. Generacion:
8086 de Intel.
Bus de datos de 16 bits y un bus de direcciones de 20 hilos.
Velocidad de 4.7 MHz.
Luego salio el micro 8088 con velocidades de hasta 12 MHz.
2da. Generacion:
Intel 80286.
Bus de datos de 16 bits y bus de direcciones de 24 hilos.
Las velocidades alcanzaban los 33 MHz.
Coprocesador matemático 80287.
En esta generación aparecen otros fabricantes como AMD y Harris.
Intel 80286.
Bus de datos de 16 bits y bus de direcciones de 24 hilos.
Las velocidades alcanzaban los 33 MHz.
Coprocesador matemático 80287.
En esta generación aparecen otros fabricantes como AMD y Harris.
3ra. Generacion:
Intel 80386DX.
Bus de datos de 32 bits al igual que el bus de direcciones.
Coprocesador matemático 80387.
Existieron versiones mas baratas como la 386SX (16 bits de datos).
En esta generación aparece la memoria cache externa. Hasta esta generación los micro se fabricaban con tecnología CISC.
Intel 80386DX.
Bus de datos de 32 bits al igual que el bus de direcciones.
Coprocesador matemático 80387.
Existieron versiones mas baratas como la 386SX (16 bits de datos).
En esta generación aparece la memoria cache externa. Hasta esta generación los micro se fabricaban con tecnología CISC.
4ta. Generacion:
Intel 486.
Bus de 32X32.
Conjunto de instrucciones RISK (Reduced Instructions Set Computer).
Memoria cache interna de 8 KB.
Integración del coprocesador matemático en el mismo chip.
Aparece el cooler.
5ta. Generacion:
Intel Pentium
Bus de 64X64
Trabaja con dos 486 en paralelo.
Competidores mas cercanos, K5 de AMD y el 5X86 de CIRIX.
Al hablar de sexta generación de micros, debemos tener en cuenta que hoy ya no existe un standard tan claro como en las generaciones anteriores donde la aparición de cada modelo de microprocesadores de Intel marcaba el comienzo de una nueva "generación" . Hoy en día cada fabricante trata de desarrollar su producto con criterios propios, tratando simplemente de superar en prestaciones al producto de la competencia, sin por ello llegar a realizar !COPIAS! modificadas.
BREVE HISTORIA DEL MICROPROCESADOR:
En la historia han existido decenas de microprocesadores pero podemos ordenarlos por orden cronológico:
1971: Intel 4004
1972: Intel 8008
1975: Motorola 6800
1976: Z80
1978: Intel 8086 y 8088
1982: Intel 80286
1985: Intel 80386
1985: VAX 78032
1989: Intel 80486
1991: AMD AMx86
1993: PowerPC 601
1993: Intel Pentium
1994: PowerPC 620
1995: Intel Pentium Pro
1996: AMD K5
1996: AMD K6 y K6-2
1997: Intel Pentium II
1998: Intel Pentium II Xeon
1999: Intel Celeron
1999: AMD Athlon K7 (Classic y Thunderbird)
1999: Intel Pentium III
1999: Intel Pentium III Xeon
2000: Intel Pentium 4
2001: AMD Athlon XP
2004: AMD Athlon 64
2006: Intel Core Duo
2007: AMD Phenom
2008: Intel Core Nehalem
2008: AMD Phenom II y Athlon II
2010: Familia Intel Core 2010
2010: Nueva Famila AMD Phenom II y Athlon II
2011: Intel Core Sandy Bridge
2011: AMD Fusion
FAMILIAS DE PROCESADORES:
Intel: 4004,8008,8080, 8086, 8088, 80186, 80286, 80386, 80486, Pentium, Pentium II, Celeron, Pentium II MMX, Pentium III, Xeon, Itanium, Pentium IV, Mobile, Itanium II, Corel Duo, Corel Duo 2,Quad Core.
AMD: K6, Athlon, Duron, Opteron, Athlon 64,Athlon 64x2
Motorola: 68000,68010,68020,68030.
IBM: Power PC, Dual Power.
Motorola: 68000,68010,68020,68030.
IBM: Power PC, Dual Power.
VELOCIDAD DEL RELOJ:
La velocidad del reloj es la frecuencia en que el procesador envia y recibe instrucciones durante un ciclo de reloj. Durante los ultiumos años la velocidad de reloj de algunos microprocesadores se ha mantenido entre los 1,5 GHz y los 4,0 GHz dando resultados impresionantes en las capacidades de respuesta de procesadores actuales.

TIPOS DE ENCAPSULADOS:
Entre los tipos de encapsulados para los microprocesadores hay 5 que son muy importantes:
DIP (Dual in-line package):
Es una forma de encapsulamiento común en la construcción de circuitos integrados. La forma consiste en un bloque con dos hileras paralelas de pines, la cantidad de éstos depende de cada circuito. Por la posición y espaciamiento entre pines, los circuitos DIP son especialmente prácticos para construir prototipos en tablillas de protoboard.

PGA (Pin grid array):
Es un tipo de empaquetado usado para los circuitos integrados, particularmente microprocesadores.
Originalmente el PGA, el zócalo clásico para la inserción en una placa base de un microprocesador, fue usado para procesadores como el Intel 80386 y el Intel 80486; consiste en un cuadrado de conectores en forma de agujero donde se insertan los pines del chip por medio de presión.

Es un encapsulado de circuito integrado para montaje superficial con los conectores de componentes extendiéndose por los cuatro lados. Los pines se numeran en sentido contrario a las agujas del reloj a partir del punto guía.

PLCC (Plastic Leaded Chip Carrier):
Es un encapsulado de circuito integrado con un espaciado de pines de 1,27 mm (0,05 pulgadas). El número de pines oscila entre 20 y 84. Las configuraciones PLCC requieren menos espacio en placa que sus competidores los leadless chip carrier.

SISTEMA DE REFRIGERACIÓN:
Debemos tener muy en cuenta el trabajo que este va hacer, puesto que esto esta muy relacionado con el calor que va a generar el microprocesador: aunque los procesadores de hoy día hacen tantos trabajos que se calientan rápido.
Para estos casos debemos tener en cuenta un medio de refrigeración para que este no se queme, por lo que necesitamos algún dispositivo que absorba el calor que genera este procesador. hay varios tipos de medios de refrigeración, entre ellos están los pasivos y los activos:
PASIVO: Un sistema de refrigeración pasivo es aquel que sin medios mecánicos es capaz de refrigerar el dispositivo. No es una forma extremadamente efectiva, pero para aquellos componentes del ordenador que no generan mucho calor o que su rendimiento no se ve afectado por el calor tanto como otros, es un buen sistema.
Se basa, normalmente en un disipador capaz de eliminar el calor del dispositivo sin necesidad de un flujo de aire constante, de esta forma se eliminan los ruidos generados por el ventilador. Estos dispositivos son comunes de las memorias, del chipset de la placa base, e incluso hay una fuente de alimentación que utiliza este sistema de refrigeración.
ACTIVO: Un sistema de refrigeración activo es aquel que utiliza medios mecánicos para conseguir enfriar el dispositivo, el más común es un disipador con un ventilador adosado, de esta forma el ventilador añade un flujo de aire continuo a las aletas del disipador, haciendo que el calor que estas desprenden, se disipe por acción de la corriente de aire.

REFRIGERACIÓN LIQUIDA: La refrigeración líquida se basa en el principio de que un líquido frío pasando continuamente por un componente caliente, hará que este último pierda parte de su calor intentando enfriar el líquido, que como siempre está frío, no podrá calentarlo, perdiendo calor ininterrumpidamente.

Un sistema de refrigeración líquida es más complejo y costoso que un sistema basado en un disipador con un ventilador, aunque resultará más efectivo que el primero. La refrigeración líquida necesita de varios componentes:
Bomba, tubo, bloque de agua, radiador, un ventilador y un depósito y obviamente el líquido refrigerador.
El sistema funciona así, el líquido contenido en el depósito, pasa a la bomba que lo envía a través del tubo, al bloque de agua, vuelve a un segundo tubo que lo lleva al radiador, ahí gracias al ventilador, el líquido se enfría, y otra vez, a través de un nuevo tubo, termina llegando al depósito, donde volverá a empezar el circuito.
INSTALACION DEL MICROPROCESADOR:
Para instalar correctamente un microprocesador debemos tener en cuenta que el tipo de placa base sea compatible con el microprocesador que vamos a instalar. En los siguientes vídeos podrán aprender a instalar un microprocesador en una placa base:
PARTES DEL MICROPROCESADOR:
Unidad de Control: Es una de las 3 partes principales en que se divide la CPU. Busca las instrucciones en la memoria principal, las interpreta y las ejecuta utilizando para esto la unidad de proceso. Existen dos tipos de unidades de control; las cableadas que se usan en maquinas sencillas, y las micro programadas, propias de las maquinas mucho mas complejas.
Unidad de Calculo: También se conoce como "ALU" (Arithmetic Logic Unit). Este circuito digital se encarga de calcular las operaciones lógicas como si, no, entre dos números, y, o, etc. y ademas las aritméticas como la suma, resta, multiplicación y división.
Unidad de Intercambio: Tiene como objeto adaptar el formato delos datos,la velocidad de operación, y el tipo de señales entre el procesador y los periféricos. también establece el cambio de entrada y salida de los datos y realiza ciertas funciones de control sobre los periféricos, por lo tanto esta es la comunicación del procesador con el mundo exterior.
TIPOS DE BUSES:
Las distintas unidades que componen el microprocesador están conectadas entre si por medio de buses. Estos son:
Bus de Direcciones: Las informaciones del bus de direcciones las proporciona bien el contador de programa en una busca normal de instrucción, bien un registro auxiliar de loa unidad de control en caso de direccionamiento indirecto, o bien uno de los registros de trabajo de la unidad de proceso.
Bus de Datos: Las informaciones del bus de datos las proporciona la unidad de datos cuando se requiere obtener alguna información de la misma, la unidad de memoria de programa cuando se lee una instrucción de ella, la unidad aritmética a partir de acumuladores o flags y los registros de la unidad.
Buses de Entradas/Salidas: No es mas que una extensión del bus de datos que recibe los datos de la unidad de entradas y los entrega a la unidad conveniente u obtiene los datos de la unidad conveniente y los entrega a la unidad de salidas.
Bus de Control: Es un conjunto de lineas por medio de las cuales se controla la actualización de distintas unidades desde la unidad de control, o bien se solicita alguna señal a la unidad de control.
sábado, 5 de febrero de 2011
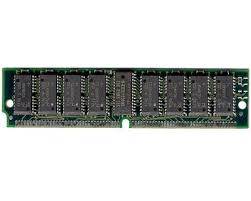
MEMORIA RAM
La memoria RAM "Random Acces Memory" o memoria de acceso aleatorio es un tipo de memoria que utilizan los Pc para guardar los datos y programas que necesitan tener de manera rápida. Las memorias RAM son memorias volátiles y no guardan los datos que han utilizado, estos datos se borran al momento de apagar el equipo. Los datos no solo se borran cuando apagamos el PC, sino que ademas se borran cuando dejamos de utilizar la aplicación que los necesitaba.
Las memorias ademas cuentan con varios factores que hacen que la memoria sea de mejor o peor calidad; entre ellos están el tiempo de acceso, el buffer de datos, el tiempo de refresco y la paridad:
TIEMPO DE ACCESO:
Este es el intervalo de tiempo que transcurre desde el instante en que solicitamos datos de un dispositivo de almacenamiento y el momento en que se completa la acción. Ademas este tambien es el intervalo de tiempo que transcurre entre el momento en que enviamos datos a un dispositivo de almacenamiento y el momento en que se termina la acción.
PARIDAD:
Es la propiedad que tienen algunas memorias RAM para detectar y corregir un error. Para ellos se añade en origen un bit extra llamado bit de paridad a los n bits que forman el carácter original.
Este bit de paridad se determina de forma que el número total de bits 1 a transmitir sea par (código de paridad par) o impar (código de paridad impar).
Código de paridad par: El bit de paridad será un 0 si el número total de1 a transmitir es par, y un 1 si el número total de 1 es impar.
Código de paridad impar: El bit de paridad será un 1 si el número total de1 a transmitir es par y un 0 si el número total de1 es impar.
BUFFER DE DATOS:
Este es un espacio de memoria,en el que se guarda la informacion para que cuando un programa o dispositivo solicite esa informacion no se quede en algun momento sin ellos. Entre algunos ejemplos podemos encontrar:
También es muy conocido como "Latencia", es la suma de retardos temporales en una red. este retardo es producido por la demora en la propagación y transmisión de paquetes dentro de la red. la latencia la puede generar principalmente el tamaño del buffer de datos del Pc y el tamaño de los datos que vamos a transmitir.
VOLÁTIL Y ALEATORIA:
La memoria RAM es volátil ya que al momento de apagar el Pc,la información que contenía esta se borra. La memoria es como un acceso rápido a la información que estamos utilizando en un proceso. Ademas, la memoria RAM es aleatoria por que toda la información que guarda esta en desorden a diferencia de el disco duro.
MEMORIAS ASÍNCRONAS:

MEMORIAS SÍNCRONAS:
SDR SDRAM: Sincrono de memoria dinámica de acceso aleatorio. Tradicionalmente, la memoria dinámica de acceso aleatorio DRAM tiene una interfaz asíncrona, lo que significa que el cambio de estado de la memoria tarda un cierto tiempo, dado por las características de la memoria, desde que cambian sus entradas.

PC66: Es DRAM síncrona que funciona a una frecuencia de reloj de 66,66 MHz, en un bus de 64 bits, a una tensión de 3,3 V. 66 PC está disponible en 168 pines DIMM y 144 pines SO-DIMM de factores de forma. El ancho de banda teórico es 533 MB / s.

PC100: funciona a una frecuencia de reloj de 100 MHz, en un bits de ancho de autobús 64, con un voltaje de 3,3 V. PC 100 está disponible en 168-pin DIMM y 144 pines SO-DIMM de factores de forma . PC100 es compatible con PC66 .

PC133: funciona a una frecuencia de reloj de 133 MHz, en un bits de ancho de autobús 64, con un voltaje de 3,3 V. PC 133 está disponible en 168 pines DIMM y 144 pines SO-DIMM de factores de forma. PC133 SDRAM fue el último estándar y más rápido cada vez aprobado por el JEDEC, y ofrece un ancho de banda de 1066 MB por segundo ([133,33 MHz * 64 / 8] = 1066 MB / s). PC133 es compatible con PC100 y PC66 .


XDR DRAM:tipo de datos extremos de memoria dinámica de acceso aleatorios un alto rendimiento de memoria RAM interfaz y sucesor del Rambus RDRAM se basa en, en competencia con el rivalSDRAM DDR2 y GDDR4 tecnología.




SRAM: es un tipo de semiconductor de memoria donde la palabra estática indica que, a diferencia de dinámica de memoria RAM (DRAM) , no tiene por qué ser periódicamente renovado , como SRAM utiliza biestable circuito de enclavamiento para almacenar cada bit.

EDRAM: un condensador con sede en la memoria de acceso aleatorio dinámico integrado en la misma morir como un ASIC o procesador .El coste por bit es mayor que el de los chips DRAM solo, de pie, pero en muchas aplicaciones, las ventajas de rendimiento de la colocación de la eDRAM en el mismo chip que el procesador supera la desventaja de costes en comparación con una memoria externa.





Las memorias ademas cuentan con varios factores que hacen que la memoria sea de mejor o peor calidad; entre ellos están el tiempo de acceso, el buffer de datos, el tiempo de refresco y la paridad:
TIEMPO DE ACCESO:
Este es el intervalo de tiempo que transcurre desde el instante en que solicitamos datos de un dispositivo de almacenamiento y el momento en que se completa la acción. Ademas este tambien es el intervalo de tiempo que transcurre entre el momento en que enviamos datos a un dispositivo de almacenamiento y el momento en que se termina la acción.
PARIDAD:
Es la propiedad que tienen algunas memorias RAM para detectar y corregir un error. Para ellos se añade en origen un bit extra llamado bit de paridad a los n bits que forman el carácter original.
Este bit de paridad se determina de forma que el número total de bits 1 a transmitir sea par (código de paridad par) o impar (código de paridad impar).
Código de paridad par: El bit de paridad será un 0 si el número total de1 a transmitir es par, y un 1 si el número total de 1 es impar.
Código de paridad impar: El bit de paridad será un 1 si el número total de1 a transmitir es par y un 0 si el número total de1 es impar.
BUFFER DE DATOS:
Este es un espacio de memoria,en el que se guarda la informacion para que cuando un programa o dispositivo solicite esa informacion no se quede en algun momento sin ellos. Entre algunos ejemplos podemos encontrar:
- En Audio o vídeo en streaming por Internet. Se tiene un buffer para que haya menos posibilidades de que se corte la reproducción cuando se reduzca o corte el ancho de banda.
- Un buffer adecuado permite que en el salto entre dos canciones no haya una pausa molesta.
TIEMPO DE REFRESCO:
También es muy conocido como "Latencia", es la suma de retardos temporales en una red. este retardo es producido por la demora en la propagación y transmisión de paquetes dentro de la red. la latencia la puede generar principalmente el tamaño del buffer de datos del Pc y el tamaño de los datos que vamos a transmitir.
VOLÁTIL Y ALEATORIA:
La memoria RAM es volátil ya que al momento de apagar el Pc,la información que contenía esta se borra. La memoria es como un acceso rápido a la información que estamos utilizando en un proceso. Ademas, la memoria RAM es aleatoria por que toda la información que guarda esta en desorden a diferencia de el disco duro.
TIPOS DE MEMORIAS:
MEMORIAS ASÍNCRONAS:
DRAM: Es un tipo de memoria dinámica de acceso aleatorio que se usa principalmente en los módulos de memoria RAM y en otros dispositivos. Se denomina dinámica, ya que para mantener almacenado un dato, se requiere revisar el mismo y recargarlo, cada cierto período, en un ciclo de refresco.Su principal ventaja es la posibilidad de construir memorias con una gran densidad de posiciones y que todavía funcionen a una velocidad alta.
FMP-RAM: Memoria de modo paginado, es el diseño mas común de los chips de memoria RAM dinámica. El acceso a los bits de memoria se hace mediante coordenadas, fila y columna. Actualmente se encuentran memorias de este tipo con velocidad de acceso de entre 60 y 70 nanosegundos.
EDO-RAM: Extendido de datos de salida. Entro al mercado en 1995 y con tiempos de acceso mucho mas rápidos que los de FPM (Entre los 30 y 40 nanosegundos). Ademas, este tipo de memoria es capaz de enviar direcciones continuas pero direcciona la columna que va a utilizar mientras que se leen los datos de la columna anterios. Esto significo la eliminación de los estados de espera.
BEDO-RAM: Es la continuación de la EDO-RAM y le hace competencia a la SDRAM, se dio a conocer en1997 pero nunca salio al mercado. Este tipo de memoria utilizaba generadores internos de direcciones y accedía a mas de una posición de memoria en cada ciclo de reloj,lo que significaba un aumento en el desempeño de un 50% mejor que su versión anterior.
MEMORIAS SÍNCRONAS:
SDR SDRAM: Sincrono de memoria dinámica de acceso aleatorio. Tradicionalmente, la memoria dinámica de acceso aleatorio DRAM tiene una interfaz asíncrona, lo que significa que el cambio de estado de la memoria tarda un cierto tiempo, dado por las características de la memoria, desde que cambian sus entradas.
PC100: funciona a una frecuencia de reloj de 100 MHz, en un bits de ancho de autobús 64, con un voltaje de 3,3 V. PC 100 está disponible en 168-pin DIMM y 144 pines SO-DIMM de factores de forma . PC100 es compatible con PC66 .
DDR SDRAM: ESon modulos de memoria RAM compuestos por memorias sincronas que podemos encontrar en el mercado con encapsulado DIMM, lo que permite la transferencia de datos por dos canales diferentes al mismo tiempo. Con datos que se transfieren 64 bits a la vez, DDR SDRAM da una velocidad de transferencia de (bus de memoria de frecuencia de reloj) × 2 (de tipo doble) x 64 (número de bits transferidos) / 8 (número de bits / byte). Así, con una frecuencia de bus de 100 MHz, memoria SDRAM DDR ofrece una velocidad de transferencia máxima de 1600 MB / s . En la siguiente tabla podremos observar algunas de las caracteristicas de las memorias DDR SDRAM:
Nombre estándar | Velocidad del reloj | Tiempo entre señales | Velocidad del reloj de E/S | Datos transferidos por segundo | Nombre del módulo | Máxima capacidad de transferencia |
DDR-200 | 100 MHz | 10 ns | 100 MHz | 200 millones | PC1600 | 1600 MB/s |
DDR-266 | 133 MHz | 7,5 ns | 133 MHz | 266 millones | PC2100 | 2133 MB/s |
DDR-300 | 150 MHz | 150 MHz | 300 millones | PC2400 | 2400 MB/s | |
DDR-333 | 166 MHz | 6 ns | 166 MHz | 333 millones | PC2700 | 2667 MB/s |
DDR-366 | 183 MHz | 5,5 ns | 183 MHz | 366 millones | PC3000 | 2933 MB/s |
DDR-400 | 200 MHz | 5 ns | 200 MHz | 400 millones | PC3200 | 3200 MB/s |
DDR-433 | 216 MHz | 4,6 ns | 216 MHz | 433 Millones | PC3500 | 3500 MB/s |
DDR-466 | 233 MHz | 4,2 ns | 233 MHz | 466 millones | PC3700 | 3700 MB/s |
DDR-500 | 250 MHz | 4 ns | 250 MHz | 500 millones | PC4000 | 4000 MB/s |
DDR-533 | 266 MHz | 3,7 ns | 266 MHz | 533 millones | PC4300 | 4264 MB/s |
DDR2-400 | 100 MHz | 10 ns | 200 MHz | 400 millones | PC2-3200 | 3200 MB/s |
DDR2-533 | 133 MHz | 7,5 ns | 266 MHz | 533 millones | PC2-4300 | 4264 MB/s |
DDR2-600 | 150 MHz | 6,7 ns | 300 MHz | 600 millones | PC2-4800 | 4800 MB/s |
DDR2-667 | 166 MHz | 6 ns | 333 MHz | 667 millones | PC2-5300 | 5336 MB/s |
DDR2-800 | 200 MHz | 5 ns | 400 MHz | 800 millones | PC2-6400 | 6400 MB/s |
DDR2-1000 | 250 MHz | 3,75 ns | 500 MHz | 1000 millones | PC2-8000 | 8000 MB/s |
DDR2-1066 | 266 MHz | 3,75 ns | 533 MHz | 1066 millones | PC2-8500 | 8530 MB/s |
DDR2-1150 | 286 MHz | 3,5 ns | 575 MHz | 1150 millones | PC2-9200 | 9200 MB/s |
DDR2-1200 | 300 MHz | 3,3 ns | 600 MHz | 1200 millones | PC2-9600 | 9600 MB/s |
DDR3-1066 | 133 MHz | 7,5 ns | 533 MHz | 1066 millones | PC3-8500 | 8530 MB/s |
DDR3-1200 | 150 MHz | 6,7 ns | 600 MHz | 1200 millones | PC3-9600 | 9600 MB/s |
DDR3-1333 | 166 MHz | 6 ns | 667 MHz | 1333 millones | PC3-10667 | 10664 MB/s |
DDR3-1375 | 170 MHz | 5,9 ns | 688 MHz | 1375 millones | PC3-11000 | 11000 MB/s |
DDR3-1466 | 183 MHz | 5,5 ns | 733 MHz | 1466 millones | PC3-11700 | 11700 MB/s |
DDR3-1600 | 200 MHz | 5 ns | 800 MHz | 1600 millones | PC3-12800 | 12800 MB/s |
DDR3-1866 | 233 MHz | 4,3 ns | 933 MHz | 1866 millones | PC3-14900 | 14930 MB/s |
DDR3-2000 | 250 MHz | 4 ns | 1000 MHz | 2000 millones | PC3-16000 | 16000 MB/s |
RDRAM: El primer PC de placas base con soporte para RDRAM debutó en 1999. Apoyaron PC-800 RDRAM, que operaba a 400 MHz y entregado 1.600 MB / s de ancho de banda en un bus de 16 bits. Se empaqueta como un 184-pin RIMM (Rambus en línea del módulo de memoria) factor de forma , similar a un DIMM (módulo de memoria en línea dual).Por razones de marketing de la velocidad de reloj física se ha multiplicado por dos (debido a la operación DDR), por lo tanto, los 400 MHz estándar fue nombrado Rambus PC-800.
XDR DRAM:tipo de datos extremos de memoria dinámica de acceso aleatorios un alto rendimiento de memoria RAM interfaz y sucesor del Rambus RDRAM se basa en, en competencia con el rivalSDRAM DDR2 y GDDR4 tecnología.
- Frecuencia de reloj a 400 MHz inicial. 600 MHz, 800 MHz y 1066 MHz, previstas para el futuro.
- Octal Data Rate (ODR): Ocho bits por ciclo de reloj por carril.
- Cada chip proporciona 8, 16, o 32 carriles programable, que proporciona hasta 204,8 Gbit / s (25,6 GB / s)
XDR2 DRAM: Es un tipo de memoria de acceso aleatorio dinámico que se ofrece por Rambus . Se anunció el 07 de julio 2005 y la especificación de que fue lanzado el 26 de marzo de 2008. Rambus ha diseñado XDR2 como una evolución de, y el sucesor, XDR DRAM . DRAM XDR2 se destina para el uso en gama alta de tarjetas gráficas y equipos de red.
DRDRAM: Es un tipo síncrono de memoria RAM dinámica , diseñado por el Rambus Corporation.En comparación con otros estándares contemporáneos, Rambus muestra un ligero aumento de la latencia , la producción de calor, la fabricación de la complejidad y costo. Algunos criticaron RDRAM de morir de mayor tamaño, que se requiere a la casa de la interfaz de agregado y los resultados a un precio de prima de 20.10 por ciento en las densidades de 16 megabits, y añade sobre una sanción del 5 por ciento en el 64M.
SLDRAM: Se preciso un mayor rendimiento y compitió contra RDRAM. Se desarrolló durante la década de 1990 por el Consorcio SLDRAM, que consistía en cerca de 20 fabricantes importantes de la industria informática. Es un estándar abierto y no requiere derechos de licencia. Las especificaciones pidió un bus de 64 bits funcionando a una frecuencia de reloj de 200 MHz.
SRAM: es un tipo de semiconductor de memoria donde la palabra estática indica que, a diferencia de dinámica de memoria RAM (DRAM) , no tiene por qué ser periódicamente renovado , como SRAM utiliza biestable circuito de enclavamiento para almacenar cada bit.
VRAM: Es uno de dos puertos variante de RAM dinámica (DRAM), que una vez fue utilizado para almacenar el uso de este dispositivo en algunos adaptadores de gráficos .
El primer uso comercial de VRAM estaba en una resolución de adaptador de gráficos de alto presentado en 1986 por IBM para el PC / RT sistema, que establece un nuevo estándar para pantallas de gráficos.
El primer uso comercial de VRAM estaba en una resolución de adaptador de gráficos de alto presentado en 1986 por IBM para el PC / RT sistema, que establece un nuevo estándar para pantallas de gráficos.
SGRAM: Es una forma especializada de SDRAM para los adaptadores gráficos.Añade funciones tales como encubrimiento bits (por escrito a un plano poco especificado sin afectar a las demás) y el bloque de escribir (llenar un bloque de memoria con un solo color). Sin embargo, puede abrir dos páginas de memoria a la vez, que simula el puerto de la naturaleza dual de otras tecnologías de memoria RAM de vídeo.
WRAM: Es una variante de VRAM que se ha utilizado una vez en adaptadores de gráficos, tales como los Objetivos de Matrox y 3D ATI Rage Pro . WRAM fue diseñado para funcionar mejor y cuestan menos de VRAM. WRAM ofrece hasta 25% más de ancho de banda de memoria VRAM y acelerado de uso común las operaciones de gráficos, tales como el dibujo y el bloque de texto llena.
TIPOS DE MEMORIA:
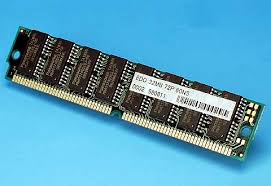
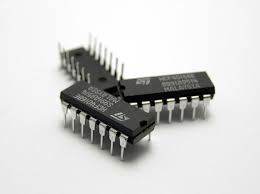
DIPP: Las memorias DIPP se presentan siempre en zocalos. Estos nunca estan soldados y estan ordenados formando grupos y ademas alineados en el mismo sentido, todos los chips son del mismo tipo.
SIPP: Este tipo de memorias se encuentran soldadas a un circuito impreso que hace contacto con la motherboard en una sola linea de pines.
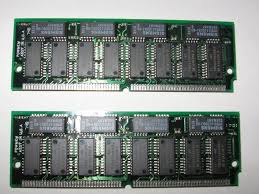
SIMM: Este tipo de modulo de memoria ya descontinuado de 30 y 72 contactos. El de 30 contactos se debia insertar en modulos pares (2,4, o 8) con capacidades de 4MB, 8 MB, o 16 MB.
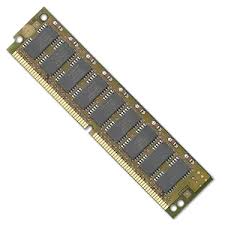
DIMM: Tiene 168 contactos en cada lado. Almacena palabras binarias de 64 bits, por cadad direccion de almacenamiento mejora su velocidad de acceso al alternar los ciclos de acceso a los bancos de memoria. Es muy utilizado por las memorias SDR, DDR, SDRAM.
Suscribirse a:
Comentarios (Atom)